Katoターンテーブルの制御 その2 [ds-DCCデコーダ]
さて、その2ですが、ArduinoUnoで動きましたのでひとまず終了です。
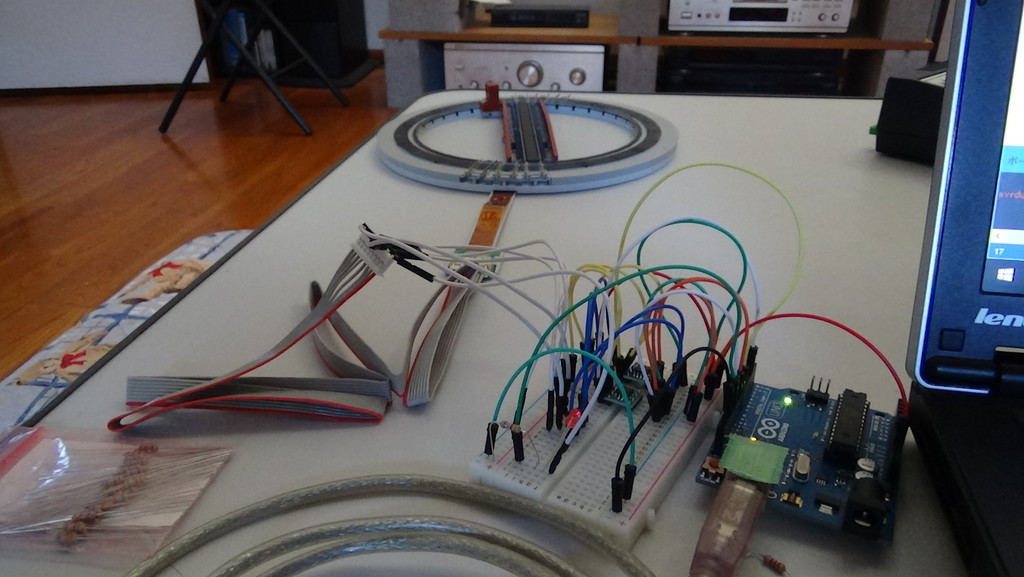
前回で、トミックスと同じで行けそうということが分かったので、今回はトミックスの時のブレッドボードをそのまま使用します。(壊さないでよかった)
で、ターンテーブルにじかに繋ごうと思ったら、コネクタ部分が2.54mmピッチよりも間隔が微妙に小さいため、細めのピンヘッダを駆使して、接続です。
で、トミックスとの違いは、
・位置決めセンサのOnOffが逆
・ロックモーターのF/Rが逆(私が考えていたのと逆というだけ)
・Katoの駆動は3.3V(Tomixは点滅LEDありのため多分5V)
細かなWaitの違いはありますが、大まかな制御は全く一緒です。
1.ロックモーターを外す
2.回転させる
3.センサが位置決めポイントまで回転させ続ける
4.センサが位置決めポイントに来たら回転中止
4、ロックモーターでターンテーブルをロック
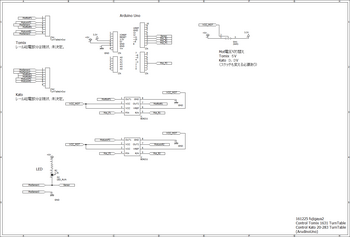
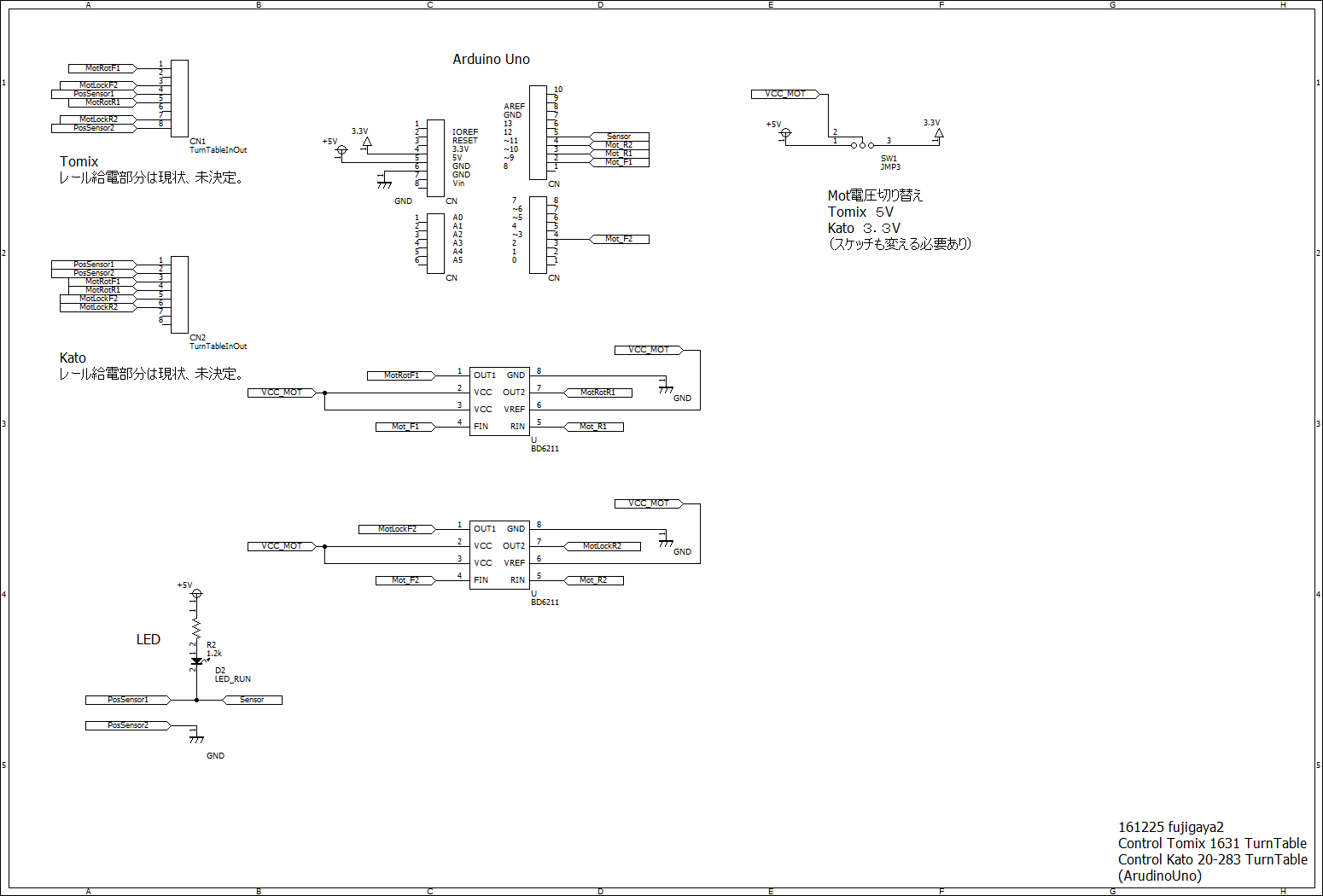
ということで、備忘用の回路図は以下。
DCCFestの時にへのへのもへじ様からお聞きしましたが、線路電源が問題になるとのこと。
リレーで反転させようかなあと思っています。
スケッチはこちら。
一応動画は以下。(本当に芸もなく動いているだけです)
前回で、トミックスと同じで行けそうということが分かったので、今回はトミックスの時のブレッドボードをそのまま使用します。(壊さないでよかった)
で、ターンテーブルにじかに繋ごうと思ったら、コネクタ部分が2.54mmピッチよりも間隔が微妙に小さいため、細めのピンヘッダを駆使して、接続です。
で、トミックスとの違いは、
・位置決めセンサのOnOffが逆
・ロックモーターのF/Rが逆(私が考えていたのと逆というだけ)
・Katoの駆動は3.3V(Tomixは点滅LEDありのため多分5V)
細かなWaitの違いはありますが、大まかな制御は全く一緒です。
1.ロックモーターを外す
2.回転させる
3.センサが位置決めポイントまで回転させ続ける
4.センサが位置決めポイントに来たら回転中止
4、ロックモーターでターンテーブルをロック
ということで、備忘用の回路図は以下。
DCCFestの時にへのへのもへじ様からお聞きしましたが、線路電源が問題になるとのこと。
リレーで反転させようかなあと思っています。
スケッチはこちら。
一応動画は以下。(本当に芸もなく動いているだけです)
2016-12-25 16:20
コメント(2)
トラックバック(0)




fujigaya2 さん、お久しぶりです。
こちらはKATOのリモコン化から初めて、後追いでTOMIXでフルDCC化してみました。
今回、レイアウトに組み込む方にお譲りするために、ケーブルを直付けして1回転の範囲で往復するような動きにしたらストレスがなくなりました。また、車両用のアドレスを割り振って1つのキャブのファンクションですべて操作できるようにしましたが、fujigaya2さんはどのようにされているのでしょうか?
by へのへのもへじ (2017-01-09 17:47)
お久しぶりです。参考にさせていただいております。
Blog拝見いたしました。元のコントローラを流用して素晴らしいですね。
私のほうは、D101でF1とF3のボタンに、右回り、左回りを割り付けて1プッシュで1メモリ移動で連続で何回も押すと回る角度を溜め込めるようにしております。(というコンセプトですがまだかなり動作が怪しいです)
なので、機関車が逆になった時の線路信号の反転をどうしようかというのが解決しておりません。安易にF4ボタンあたりにDCCの反転スイッチを割り付けてしまおうかなあとも思ってたりもしますが・・・。
by fujigaya2 (2017-01-09 21:25)